
 Yahoo News
Yahoo News This Is the Robotic Hand That Could Finally Take Over Your Job
If you’re worried that robots will one day replace humans and make people obsolete, you should take solace in the fact that one of the most difficult human parts to mechanically replicate is the hand. The human hand can accomplish a nearly endless amount of tasks—not just because of how versatile our hands and fingers are, but also because we can intuitively determine how much force to apply. It’s incredibly challenging, for instance, to teach a robot how to hold an egg with two fingers firmly without crushing the shell.
A team of South Korean scientists may have just solved this problem—and perhaps opened the door to robots finally taking over our jobs. In a new paper published in Nature Communications, the team shows off a new robotic hand prototype that can change its force on the fly and complete a huge variety of tasks with no trouble at all.
“To enable more diverse tasks with robots, we wanted to create a robot that can manipulate various objects like a human hand,” Uikyum Kim, an engineer at Ajou University in South Korea and the lead researcher of the new study, told The Daily Beast. “When I checked the current robotic hand technologies, I realized that they lacked the ability to cut paper with scissors or crush cans like a human hand. Research like ours has started to fill these shortcomings.”
Roboticists have typically found success making a robotic hand nimble and dextrous—or making it grasp objects with appropriate force. Rarely were they able to create something that checked off both boxes. Robotic parts are able to move around thanks to what are called actuators; and they are able to figure out what an object is and how to hold it thanks to tactile sensors. Actuators and sensors take up space, and it’s never been easy for engineers to install both kinds of parts into a narrow space like a finger.
Kim and his colleagues managed to come up with a goldilocks design that provided just the right amount of balance to both parts. The new robotic hand, which they call ILDA (integrated linkage-driven dexterous anthropomorphic), consists of about 20 joints and gives it about 15 degrees of movement. It weighs about 1.1 kilograms, but has a fingertip force of 34 Newtons (the typical human finger can apply about 47 Newtons).
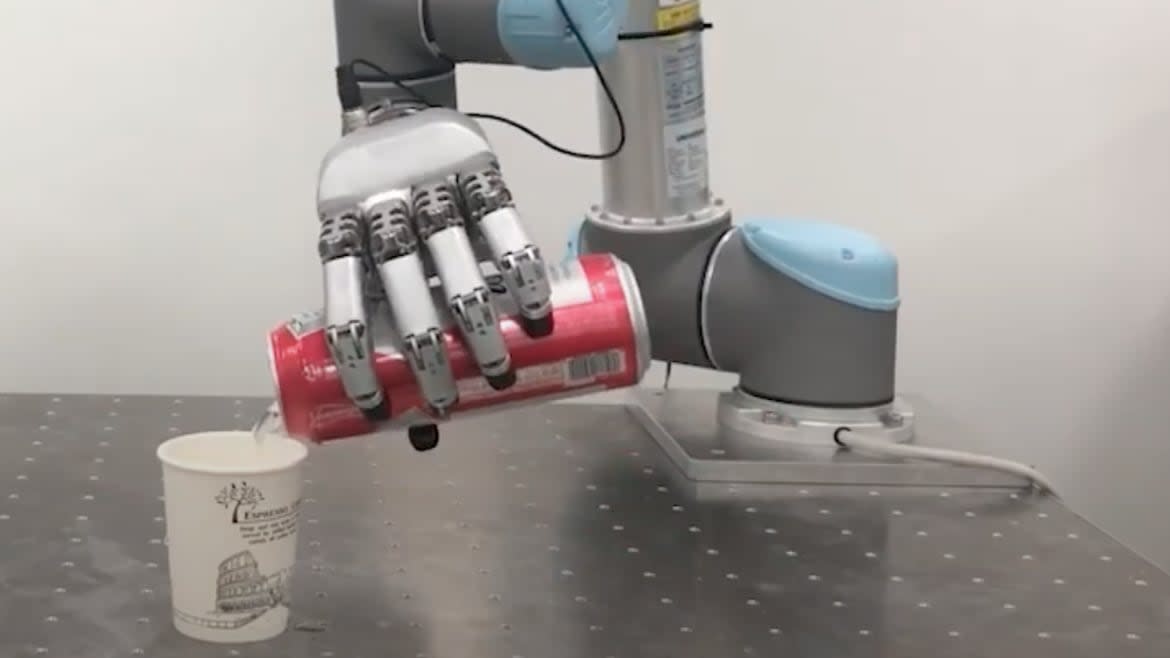
As you can see from the videos, ILDA learned how to cut paper with scissors, move objects around with tweezers, lift weights, and crush soda cans. It can switch back and forth between arts and crafts and power lifting without missing a beat.
Kim explained that ILDA doesn’t need any additional modifications to accomplish these different tasks. It should be “very easy” to integrate into existing commercial robotic arms, which means we could see it taking over industrial or service tasks with minimal training and testing.
As if that weren’t enough, Kim plans to move forward with developing better tactile sensors for newer versions of ILDA, including ones that could be used as a part of an artificial skin for robotic hands.
Got a tip? Send it to The Daily Beast here
Get our top stories in your inbox every day. Sign up now!
Daily Beast Membership: Beast Inside goes deeper on the stories that matter to you. Learn more.

